这是您想要的页面.
查看搜索结果:
您希望搜索哪方面的内容?
建议的搜索
No product matches found - System Exception
符合的结果
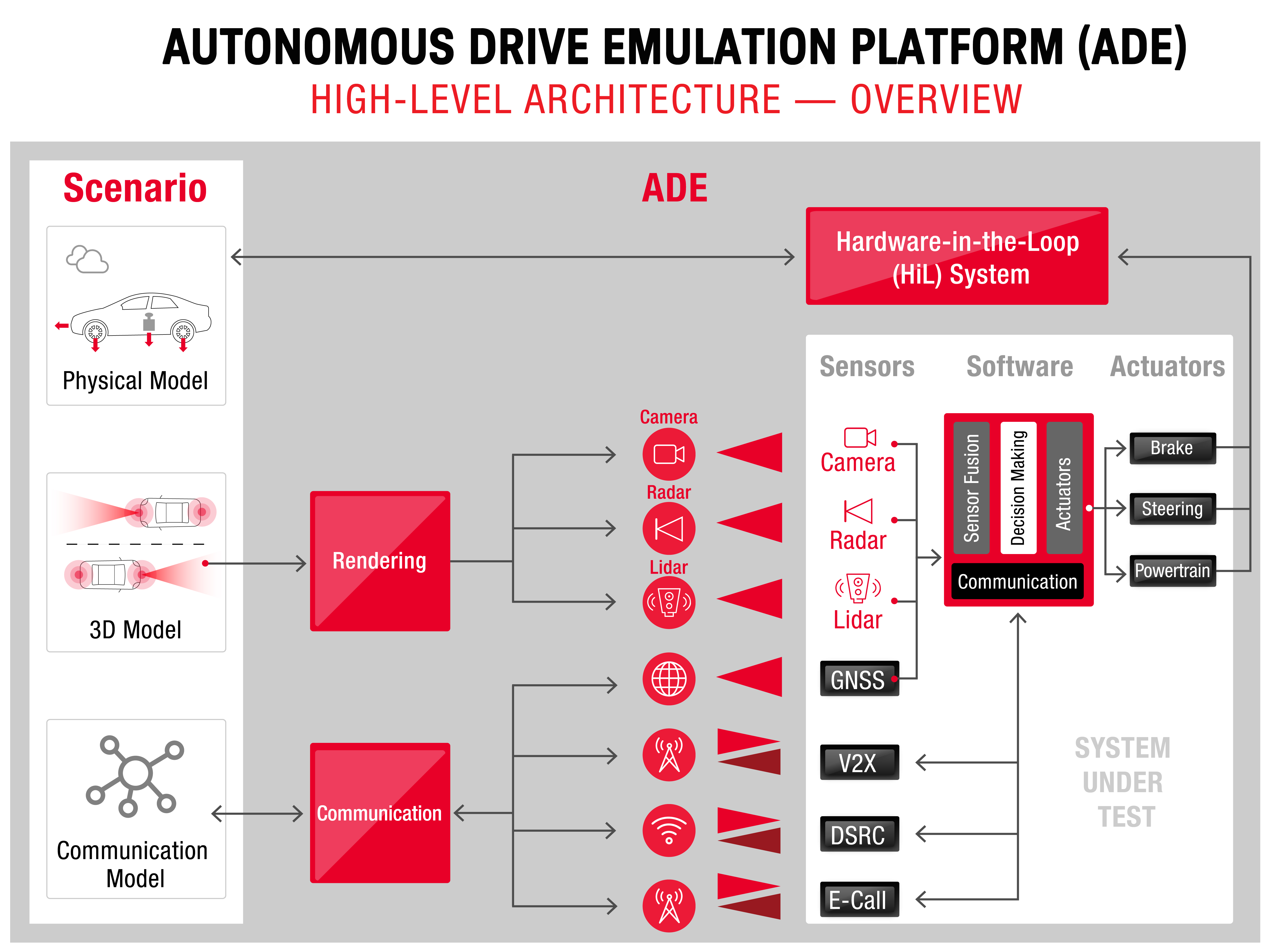
C-V2X 自动驾驶仿真模拟


通过同步测试基于通信的系统,显著增强验证能力
C-V2X 自动驾驶仿真模拟特点
通过同步测试基于通信的系统,显著增强验证能力
- 包含将 C-V2X 场景与 HIL 系统整合在一起的应用级测试
- 在开发周期中尽早验证更多系统
- 涵盖所有主要地区的场景:中国、欧洲和美国
- 验证与 ITS 堆栈相关的性能,确保与车辆的准确通信
- 轻松设置预定义场景,为实验室提供第一天测试的使用场景
- 跨越应用层、ITS 堆栈和 PC5 链路级别加速检测错误和互操作性问题
- 减少进行不可重复的路测,避免付出高昂成本
V2X 通信的核心目的是通过广播消息的方式提供标准化的安全服务,即通过广播提醒每一辆车注意周围的其他车辆以及它们的位置、轨迹和速度。 车辆通常使用 5.9 GHz 频段中的无线链路与其他车辆以及交通信号灯等路侧单元进行通信。 这种通信的覆盖范围达到 300 米,且不受视距限制,因此车辆能够“看见”并探测到可能被建筑物、树木等障碍挡住的其他车辆。
从短期来看,欧洲(C2C 论坛)、北美(SAE)、中国(C-SAE)和其他地区的标准机构纷纷以使用场景的形式对 V2X 应用进行了定义。 从长远来看,很多应用(例如 5GAA 所考虑的应用)在开发时都需要依赖 V2X 信息以及其他传感器数据。 总的说来,这些因素决定了在设计支持 V2X 的 ADAS 时,必须对其进行多大规模和范围的测试。
现在,是德科技推出了一款能够适应 C-V2X 标准不断演进的解决方案。 SA8700A 测试解决方案支持射频、协议和应用层测试;底层平台还将支持 5G NR C-V2X 的未来版本。 这不仅能保护最终用户在这个解决方案上的初始投资,还有助于加快部署支持先进安全功能特性的新技术。
- 发射机测试:功率、误差矢量幅度(EVM)、频率准确度、带内发射、相邻信道泄漏比(ACLR)
- 接收机测试:灵敏度、最大输入电平、邻道选择性
- 协议测试:确保正确地发送和接收 PC5 链路协议、V2X 消息类型和内容。 全面覆盖用于 GCF 和 PTCRB 器件认证测试的 C-V2X 和 LTE 协议测试例。
- 应用层测试:包含将 C-V2X 场景与 HIL 系统整合在一起的应用级测试
关键特性与优势
- 随着传感器系统的发展和测试要求的变化,升级解决方案
- 充分发挥可扩展 ADE 平台的灵活性
- 添加相关的传感器类型,覆盖更多的 ADAS 和 AV 场景
- 开放式 ADE 体系结构可以保护最终用户对硬件在环(HIL)系统和 3D 建模软件的投资
- 能够尽量利用现有的测试环境和工作流程,降低整合成本
- 轻松重复使用软件仿真器所创建的测试场景
- 轻松设置预定义场景,为实验室提供第一天测试的使用场景
- 加速检测 C-V2X 应用层中的空白
- 快速识别 ITS 堆栈较低层中的互操作性问题
- 减少进行不可重复的路测,避免付出高昂成本
- 确保可以对 SOP 后期发布的功能特性和更新进行一致测试
- 使用 24x7 全天候回归测试,确保未来更新的质量

扩展功能
C-V2X 自动驾驶仿真模拟特色资源










是德科技相关解决方案








{kind=link}
C-V2X 自动驾驶仿真模拟更多相关资料
需要帮助或遇到问题?